最近特斯拉CEO马斯克两次在社交平台炮轰激光雷达一事涵乔财富,引来了争议。
马斯克称Waymo的自动驾驶激光雷达方案在恶劣天气条件下,如降雪、降雨甚至沙尘暴等场景中,激光雷达会陷入导航困境。并表示:“受反射散射影响,激光雷达在雪、雨或沙尘环境下表现糟糕,这也是Waymo在强降水天气里完全无法行驶的原因。”
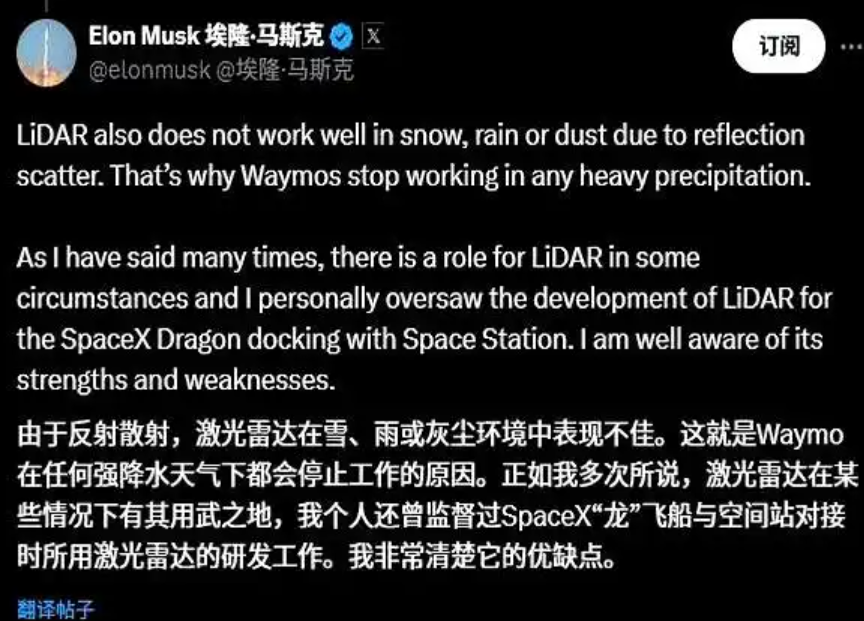
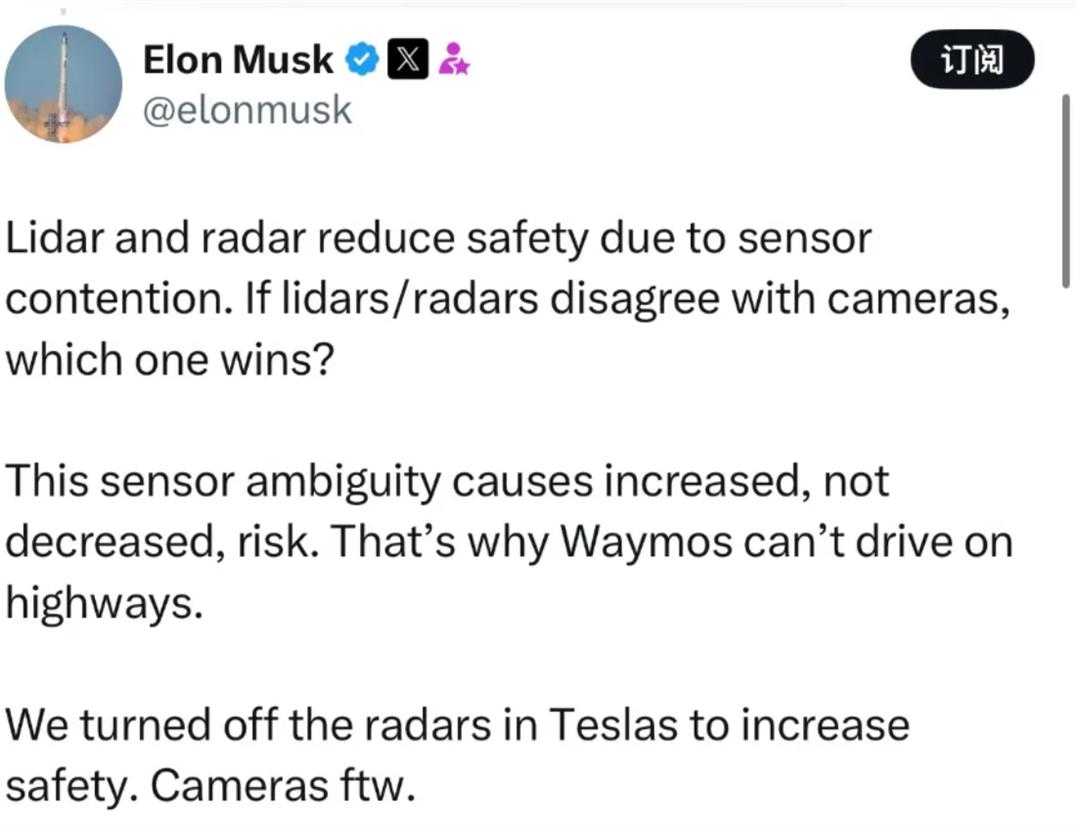
马斯克举例称SpaceX“龙”飞船与空间站对接就依靠激光测距,“我比谁都清楚它的长处与短板”。但在开放道路的量产车上,坚持多传感器反而带来隐患。因为多传感器数据冲突会增加系统决策风险,而纯视觉是最优解。
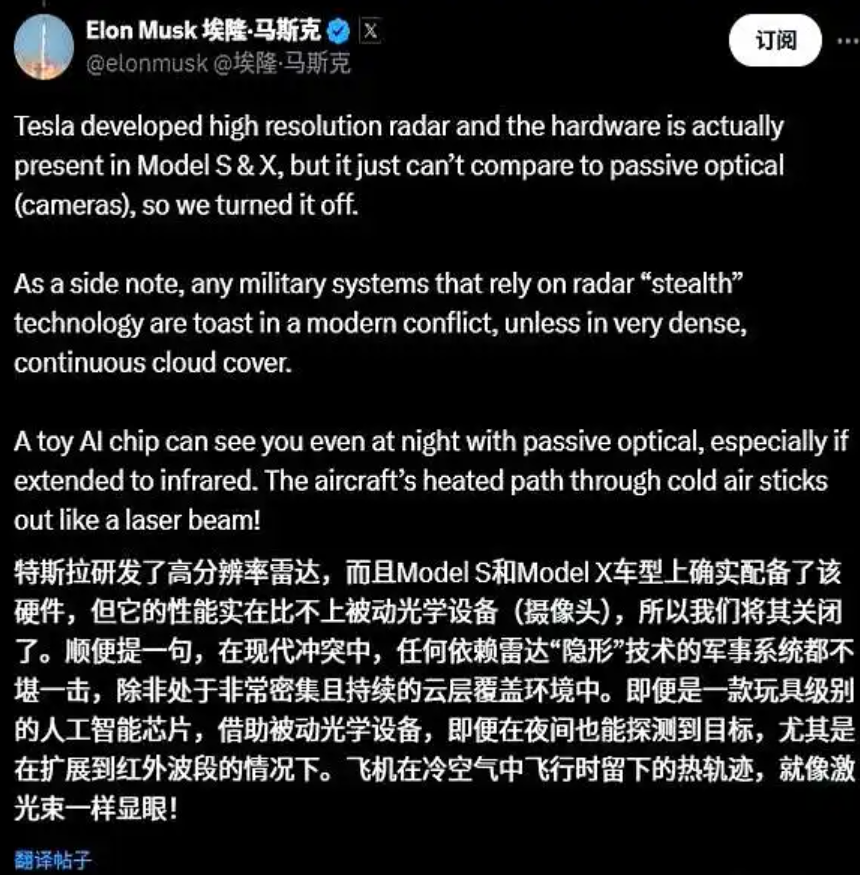
特斯拉的车型到目前为止一直采用纯视觉方案涵乔财富,靠8个摄像头完成对环境的感知。其实在2021年的时候就有人提问马斯克为什么不考虑激光雷达的相关方案。马斯克倒也直白,称Model S/X曾搭载过自研高分辨率雷达,但实测性能“远不及被动光学”,遂彻底停用。简单说就是尝试过,不好用,放弃。

其实前几年大家对于激光雷达和纯视觉的方案讨论的没有那么激烈,大部分人都遵循一个观点,就是激光雷达很贵,纯视觉成本更低。不过随着技术进步,生产链逐渐成熟,激光雷达成本降下来了。通过相关数据来参看,满足L2级驾驶辅助需求的主激光雷达,价格从2016年的4万美元降到了200美元,如此看来确实是成了“白菜价”。

所以近两年搭载激光雷达的车型越来越多了,比如不到15万的广丰铂智3X,喊出了14万级激光雷达+全场景智驾的口号。而按照特斯拉的定价和单车利润来看,特斯拉如果用激光雷达方案真不算个什么事,依旧会是最赚钱的车企,所以不选择激光雷达,和成本没太大关系。马斯克不用的原因,还是坚持激光雷达算法普及仍存在障碍。

那么激光雷达和纯视觉两条技术路径到底孰强孰弱?恐怕谁也给不出一个标准答案。激光雷达的原理是通过发射激光束并测量反射光的时间来构建车辆周围环境的三维点云图,精度高、抗干扰能力强,能够提供精确的物体、距离等信息,在复杂环境和恶劣天气下识别效率更高,但数据处理量大,比较吃算力。纯视觉方案则依赖摄像头捕捉图像,利用深度学习算法对图像进行分析和理解,模拟人类驾驶员的视觉感知,但理论上来说在复杂环境下的识别准确性和可靠性相对低一些。

想必大家都看了懂车帝的辅助驾驶测试了,涵盖了市面上主流热门车型,也包括不同的视觉方案。正所谓理论是理论,实践是实践,单从硬件条件上,是不能判断实际体验的。硬件是一方面,软件是另一方面。

而针对激光雷达和纯视觉方案车企大佬也有不同的看法,比如何小鹏曾表达视觉方案上限更高,未来可发展空间更大,可不断迭代提高识别能力,并举例说未来能看清200米外的一颗钉子。李想则认为激光雷达更加安全,摄像头无可见光数据没有激光雷达远,并举例说了中国夜间的高速尾灯损坏的大货车。

编辑总结:
关于激光雷达与纯视觉方案谁更好的讨论肯定还会继续,但不可否认的是当激光雷达成本降下来后,更多车企愿意去使用,而纯视觉确实是特斯拉一家独大,两种方案都有各自的优缺点,就像插混和增程一样,少不了争议。而马斯克发文的节点其实细想每次都存在一些深意,最近Model Y接连更新,YL和YP出现的节点不就和这个话题的讨论挺吻合的吗?创始人先生可不是真憨的脱口秀演员。在L4级别自动驾驶正式开放前涵乔财富,激光雷达与纯视觉就可劲儿打嘴炮吧,毕竟还没有相关数据能够佐证实际事故率,无法客观评判实际能力,一切交给时间吧。
天弘配资提示:文章来自网络,不代表本站观点。
相关文章



沪深京指数
热点资讯
